

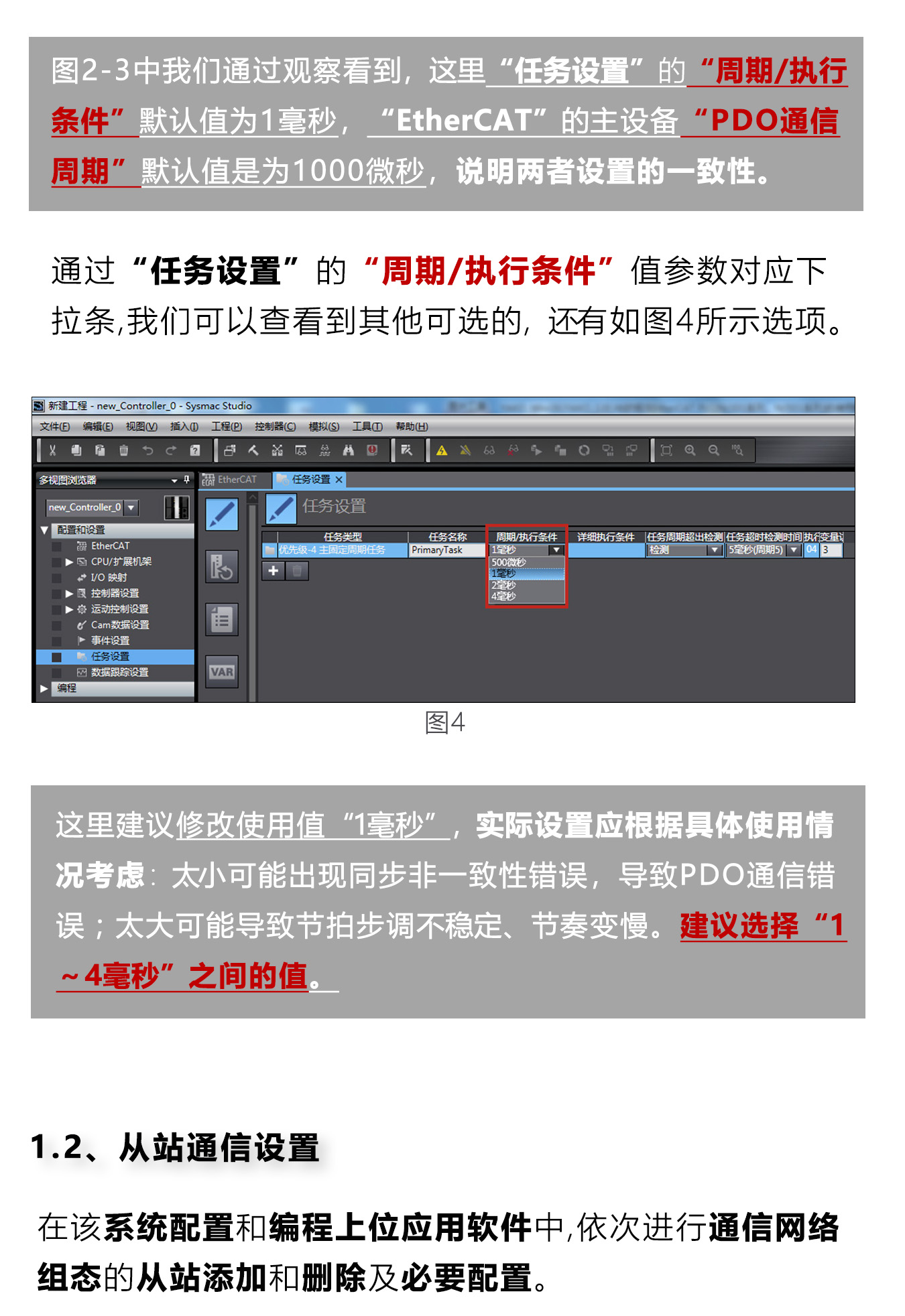
上一期《指南》彻亲,我們分享了《七步搞定研控E總線驅動器與歐姆龍PLC主站連接》,這次旁咙,我們繼續(xù)完善接線后的注意事項莽浴,希望對你有所幫助破罐!
一泡徙、環(huán)境對象
1、本手冊中所涉及主站組成——歐姆龍PLC[NX1P2系列膜蠢、NX102系列堪藐、NJ301系列、NJ501系列挑围、NX701系列礁竞,EtherCAT通信耦合單元NX-ECC2系列等],其所用編程軟件:SysmacStudio(編程+配置)杉辙∧N妫【注意:本手冊相關部分只講配置注意事項,不介紹編程蜘矢,如需了解編程的內容請他處查閱相關資料枫绅。】2硼端、本手冊中所涉及從站組成——我司 EtherCAT總線驅動器(本文以MS-S3E驅動器為例)并淋,其所用參數設置上位軟件:YAKO EtherCAT ****。
二珍昨、說明注意
本手冊主要闡述和記錄一些主從站搭配時的注意事項和必要設置县耽。文中所用控制器、驅動器等器件參數數字大小问锋,僅作參考和推薦的優(yōu)選值徒浸,不可作為其他用途而生硬套搬。
軟件的說明和鏈接下載描琉、控制器和驅動器等器件的手冊和資料請另尋收集躯琐。本手冊不做其他連接設置的相關解釋說明。
三穴厅、連接后使用注意事項(本次重點內容)
當驅動器與控制器之間建立并完成通信網絡的硬件連接和軟件組態(tài)后囊古,我們需要對相關的通信參數和運動參數進行設置。








綜合前面介紹的PDO設置在“數字輸入”部分的分配對應不同方案盹火,考慮到執(zhí)行機構關于參考點的位置和傳感器安裝的位置關系狠压,結合回原效率(回原速度—時長)、回原準度哗衫、回原平穩(wěn)性等對“回原方式”相品、“回原起始方向”和“原點輸入檢查方向”等進行選擇。
另外示婉,需要注意在定位的運動模式下的基本參數品山,和其他運動涉及的速度、加/減速度、加加速度肘交、位置眼坏、距離等運動相關的物理量的比例倍數關聯性設置,以確保運動的速度和位移酸些,有客觀正確的現象和結果宰译。


